









打上ロケットも探査機も仕様が決まっていませんが軌道設計するとこんな感じ。目的は違うけどボイジャー2号みたいな軌道も可能。以下、機械翻訳。
セドナへのミッション機会の分析 2029-2034
この記事では、2029-2034年に打上される海王星以遠天体(90377)セドナへの軌道設計に焦点を当てています。セドナは現在、太陽から約74 auの距離で周囲に移動しています。近日点通過は2073-74年と推定されています。それはそのような遠い天体を研究する機会を開きます。軌道と1万年の期間で知られるセドナは、深宇宙探査のためのエキサイティングな物体です。現在の研究は、セドナへの転送の2つの可能なシナリオを提供します。直行便と重力アシスト操縦を含むフライトが考慮されます。今回の研究では、全特性速度と飛行時間値が高いため、直行便は実質的に非現実的であることが示された。有望なシナリオには、金星、地球、木星、土星、海王星付近の重力アシスト操縦が含まれます。セドナへの飛行中に小惑星への接近の分析が行われていた。この記事で発表された調査の結果は、2029年の打ち上げが最小の総特性速度の点で最良の転送条件を提供することを示しています。分析は、2034年に打ち上げのための大きなメインベルト小惑星(16)プシケの小さな追加のインパルスフライバイと2029年の打ち上げのための(20)マサリアが可能であることを示しています。
キーワード:セドナ、ミッションデザイン、重力アシスト、最適化、深宇宙、小惑星
長い間、オールトの雲の概念は単なる仮説でしたが、1992年には天文学者J. X. X. Luu
D.C. Jewittは、近日点が約40 au、遠日点が約43auの天体(15760)アルビオンを発見しました。
この発見により、太陽系のカイパーベルトの領域が約30と60auの間に存在することが確認されました。
近地点が80auを超える物体(15874)1996TL66が1996年に発見されました。
巨大惑星の重力の影響により、1996TL66軌道が変更される可能性があります。発見はの必要性を明らかにした
外側のカイパーベルト領域とオールトの雲の間に位置する、明確な空間領域の分類
内側部分。この領域は、巨大惑星の重力場の影響で物体の軌道が変更され、そのまま宇宙に散乱する可能性があるため、散乱円盤天体と名付けられました。既知のほとんど
散乱円盤天体は海王星と軌道共鳴しています。さらなるステップはオブジェクト2003でした
天文学者M.ブラウン、C。トルヒーリョ、D。ラビノウィッツによる太陽から約80auでの2003VB12の発見
(Brown et al。、2004)。その後、このオブジェクトは(90377)セドナと名付けられました。 2004年から2006年まで、一連の
ハウメア、マケマケ、エリダ、クワワル、オーク(サイズは約1〜2000 km)などの大きな物体が続きました
(Jewitt&Luu、1995)、およびカイパーベルトで現在知られている他の比較的小さな物体
散乱円盤天体が発見されました。非常に多くの大きなオブジェクトの発見は、論理的な撤退につながりました
冥王星の惑星カテゴリー(冥王星とそれらの大きな天体は準惑星と呼ばれるようになりました)からの
同時に、太陽系外縁天体という名前の新しい団体の設立に。
散乱円盤天体のオブジェクトとしての(148209)2000 CR105および(90377)セドナとして。しかし、最初のオブジェクトは
セドナよりもわずかに早く太陽から発見されましたが、直径は比較的小さいです(セドナの直径約1000kmと比較して約285km)、セドナよりも太陽からの距離が短い、393
遠地点でのau。発見者(Brown et al。、2004)は、セドナをオールトの雲の内部オブジェクトとして分類していました
(de la Fuente Marcos&de la Fuente Marcos、2014; Saillenfest et al。、2019)セドナの遠地点による
半径は約1000auです。現在のところ、オールトの雲に属するオブジェクトは架空のものであり、
特定の研究が必要です。 Oort Cloudオブジェクトの候補としては、セドノイド(541132)が考えられます。
Leleākūhonua(2015年に発見、以前は2015 TG387として知られていました)(Sheppard et al。、2019)、および小惑星
2017 MB7(2017年に発見)。遠地点の半径が2000auを超えているため。
セドナは、その非常に細長い軌道と多くのことによって、上記の他のオブジェクトの中で区別されます
より大きな遠地点半径。オブジェクトの表面構成は、カイパーベルトでも一般的です(Cuk、2004)。
(Trujillo et al。、2005; Barucci et al。、2005; Emery et al。、2007;Páletal。、2012; Trujillo&
Sheppard、2014)、オブジェクトには、照射されたメタンによって生成された炭化水素堆積物の層があります。 炭化水素堆積物の存在は、セドナの表面が真っ赤な色合いである理由かもしれません(Cuk、
2004;シェパード、2010)。いくつかの研究は、水面下に海があるかもしれないことを示唆しています
オブジェクトの内部熱によって加熱されたセドナの(Husmann et al。、2006)。セドナの起源は
議論。発見者(Brown et al。、2004)は、セドナが太陽系で作成されたと考えています
その進化の初期段階で、それに続く動的効果のためにその軌道が変更されました
密集した星団内での太陽の形成(Brown et al。、2004; Morbidelli&Levison、2004; Kenyon&
ブロムリー、2004;アダムス、2010; Kaib et al。、2011;ブラッサー&シュワム、2015)。他のバージョンによると、
セドナの軌道は、恒星との遭遇によって変化しました(Kaib&Quinn、2008)(たとえば、ショルツ星の通過
7万年前(Mamajek et al。、2015)、太陽から52,000 auの距離にある)、またはセドナは
星間空間の低質量星または褐色矮星から捕獲された(Morbidelli&Levison、2004)。
現在、セドナは太陽から約80auの距離にあります。
その近日点の通過は2073-74年になると予想されています。セドナの公転周期は1万を超えているので
何年もの間、セドナに宇宙船を打ち上げ、それを至近距離で研究するというユニークな機会が現在開かれています。
セドナのような遠くの物体への宇宙ミッションは、惑星の重力アシストを使用して実行する方が良いです、
つまり、惑星の重力場を使用して、宇宙船の軌道エネルギーを増加させ、目的を持って使用する
弾道を変える。この記事(McGranaghan et al。、2011)は、移動軌道の研究結果を示しています。
2015- 2047年にセドナ(および他の4つの太陽系外縁天体)に。その論文は、地球と木星とセドナの移動、つまり木星でのみ重力アシスト操作を考慮しています。
が想定されます。転送の最適化、最小ΔV予算に関しては、24。48年の飛行時間のために著者によって作成されました。この最小値、
打上日に応じて、7.2(2045年)から11(2023年)km / sの範囲内にあります。同様の研究
(Kreitzman et al。、2013)によって実施されました。論文では、著者は太陽光発電の使用を研究しました
遠方の太陽系外縁天体に到達するための推進力(低推力)。
太陽系外縁天体へのミッションの分析に捧げられた他の出版物もあります。
記事(Zangari et al。、2019)は、以下を使用して100個のオブジェクトへの飛行に必要なΔV値を分析します。
木星の重力アシスト。論文(Sanchez et al。、2014、2019)は、ハウメアシステムへの飛行について考察しています。
海王星の軌道を超えた他のいくつかの準惑星は、衛星に侵入する可能性があります
軌道。作業中(Sukhanov&de Almeida Prado、2019)は、転送のためのテザースイングバイの使用を分析しました
ハウメアシステムへ。作業中(Aime et al。、2021)、著者はフュージョンドライブの使用を高速で分析しました
太陽系外縁天体に移す。
提案された論文は、セドナへの最適な軌道の詳細な分析の結果を示しています。
2029、2031、2034。また、2033、2036、および2037での打ち上げについて簡単に検討しますが、これらの年は
2029、2031、2034よりもミッションに不利です。
ここと以下のΔVバジェットは、ΔVΣとして指定されます。この値には、必要な∆V0値が含まれます
低軌道(LEO)から太陽周回軌道への移動と、搭載機を使用した操縦用
近くの推進システム(ここと以下では、これらの操作をアクティブ操作またはインパルスと呼びます)
惑星や深宇宙。転送中の軌道修正操作は行われません。
ナビゲーションと操作の実行精度に依存するため、考慮に入れてください。
本論文は、重力アシストを含む様々なミッションシナリオの研究結果を提供する
いくつかの惑星の近くで操縦します。地球からセドナへの直接飛行、およびその他の飛行シナリオが分析されます。
金星-地球-地球-木星または金星-地球-ΔVα-地球-木星の操作を使用します。ここで、ΔVαは
遠地点近くの衝動。このような操作により、ΔVΣの値が少し大きい木星に到達できます。
LEOからの地球-金星飛行にのみ必要なΔV0の値よりも。さらに、考慮されたすべて
セドナへの飛行のシナリオ(直行便を除く)には、ジュピターの近くでの重力アシスト操作が含まれます。重力
土星と海王星の近くでのアシスト操作も分析されます。
天王星は乗り換えから遠く離れた場所にあります
考慮された打ち上げ期間の軌道、これがこの惑星の重力アシストを実行することが不可能である理由です。
分析されたすべての飛行について、最適な(最小のΔVΣ値に関して)軌道が決定されました。
シナリオ。このタイプの最適な転送には長い時間がかかります。したがって、飛行の制限
20、25、30、40、および50年に等しい期間も考慮されました。以下に示すように、最高のフライト
スキームは打ち上げ日に依存します:2029年と2031年の地球-金星-地球-地球-木星-セドナ、2034年の地球金星-地球-地球-木星-海王星-セドナ。地球地球のアフェリオンは、ΔVΣをわずかに減少させます。さらに、飛行時間は25年です(つまり、およそ
(McGranaghan et al。、2011; Kreitzman et al。、2013)で受け入れられているのと同じように、ΔVΣは
セドナへの軌道のすべてのケースが考慮されました(McGranaghan et al。、2011; Kreitzman et al。、2013)。
この論文で検討されているいくつかの飛行計画では、木星に近距離で接近する必要があります。
重力アシスト。たとえば、これは地球-金星-地球-地球-木星-セドナの転送で発生し、ミッションがあります
2034年に打ち上げられ、30年の飛行時間。この場合、宇宙船は木星の高さで飛行します
4.2千キロメートルの、そして木星の強力な放射線帯は電子機器にとって危険かもしれません
宇宙船のコンポーネント(Podzolko et al。、2011)。しかし、宇宙船は放射線帯を通過します
木星の重力アシスト中は高速で、宇宙船の電子部品への放射線の危険性
小さいかもしれません。提案された論文の著者は、ΔVΣ値を評価することが合理的であると考えました。
2034年に打ち上げられ、木星より上の最低高度に制限がある30年の飛行時間は等しい
60万キロに。宇宙船が受けた放射線量の正確な推定
木星フライバイと宇宙船の電子部品に対するその危険性
放射線からの保護には、追加の研究が必要です。
セドナへの分析された最適な軌道のいくつかはまた、1つまたは
小惑星への接近に必要な追加のインパルスが比較的小さい、より多くのメインベルト小惑星。
3.セドナへの飛行のための重力アシスト操作
木星に到達するために金星と地球の重力アシストを使用して、大幅な削減を可能にすることができます
∆VΣ。 Earth-Venus-Earth-Jupiter(EVEJ)転送を使用できます(つまり、操作VEGAの適用=金星-地球の重力アシスト)ΔVΣを下げる。ただし、この操作を使用する利点は、
必要なΔVΣの項sでの木星への直行便は、大きいため比較的小さい(1 km / s未満)
金星または地球のフライバイ中には、追加のアクティブな操作が必要です。同時にEVEJ
飛行は木星への直行便よりはるかに長いです。これが、EVEJスキームが考慮されなかった理由です。
私たちの分析。
重力アシストを含むスキームの予備分析は、Tisserandを使用して行うことができることに注意してください
グラフ(Strange&Longuski、2002)。これにより、最小の∆V値を提供するスキームを決定できます。の
特に、木星への飛行計画の分析によって示されるように、作業で実行されました(奇妙な
&Longuski、2002; Hughes、2016)最低のΔVコストは、金星-地球-地球の重力アシストによって提供されます。
地球からセドナへの直行便と地球-木星-セドナへの直行便の考慮とは別に、このスキームを使用しました。
つまり、木星に到達するための金星-地球-地球重力アシスト(VEEGA)。このシナリオはそれを作ります
LEOからの飛行に必要なΔV0値よりもわずかに高いΔVΣ値で木星に飛行することが可能
金星へ。 2つの地球フライバイ間の飛行時間は2または3年です。近くの比較的低いインパルスΔVα
ほとんどの場合、ΔVΣの値を減らす地球から地球への弧の遠地点が実行される可能性があります。追加する
飛行シナリオへのそのような操作は、著者によっても研究されました。地球からセドナへの直行便
また、重力アシスト操作を使用したフライトとの比較も検討されています。
VEGAとVEEGAの操作には2つの欠点があります。まず、それらは打ち上げでのみ可能です
1。6年ごとの金星への飛行期間。第二に、VEGAの操縦により、飛行時間が長くなります。
1年半とVEEGAはさらに2、3年操縦します。これらの不利な点の最初のものは
これらの操作の代わりに次の飛行スキームを使用することによって排除されます:
•宇宙船を、高い遠地点と約2年の期間を持つ楕円形の太陽周回軌道に打ち上げる。
•遠地点の近くで数百m / sのアクティブな操縦を実行します。
•軌道の別のポイントで地球に戻り、地球の重力アシストを実行します(いわゆる
∆VEGA操作= ∆V + Earth Gravity Assist)。
∆VEGA操作は、任意の開始日に実行でき、期間は大幅に短くなります
VEEGA操作よりも。ただし、木星に到達するには、ΔVEGAには約1.5のΔVが必要です。
VEEGAよりkm / s多い。 ∆VEGA操縦は、Juno宇宙船によって適用されました(Matousek、2007年)。
2011年に木星に打ち上げられ、現在、衛星軌道からこの惑星を研究しています。著者は持っています
セドナへの軌道の分析では、この作戦は考慮されていません。 (それは簡単にわかります
地球-地球軌道遠地点の近くでのΔVαによるVEEGA操縦は、VEGAとVEGAの組み合わせです。
∆VEGA操作)。
VEEGA操縦の2番目の欠点は、宇宙船のおかげで簡単に回避できます。
金星、地球、木星の重力によって提供される高い軌道エネルギーが支援します。この高エネルギーのために、
合計期間を大幅に短縮でき、ΔVΣは直接の場合に必要な時間よりもかなり低くなります。
木星への飛行と同じ飛行時間。これについては、この記事で説明します。
セドナへの飛行のシナリオでは、以下の指定が使用されます。
ESed = Earth-Sedna直行便
EJSed = Earth-木星-セドナ
EVEEJSed = Earth-Venus-Earth-Earth-Jupiter-Sedna
EVEEJSSed = Earth-Venus-Earth-Earth-Jupiter-Saturn-Sedna
EVEEJNSed = Earth-Venus-Earth-Earth-Jupiter-Neptune-Sedna
EVEΔVE=地球-金星-地球-地球の軌道セグメントの遠地点の近くでのインパルスΔVαによる地球の操縦。
VEGAとΔVEGAの操作のシナリオを図1に示します。
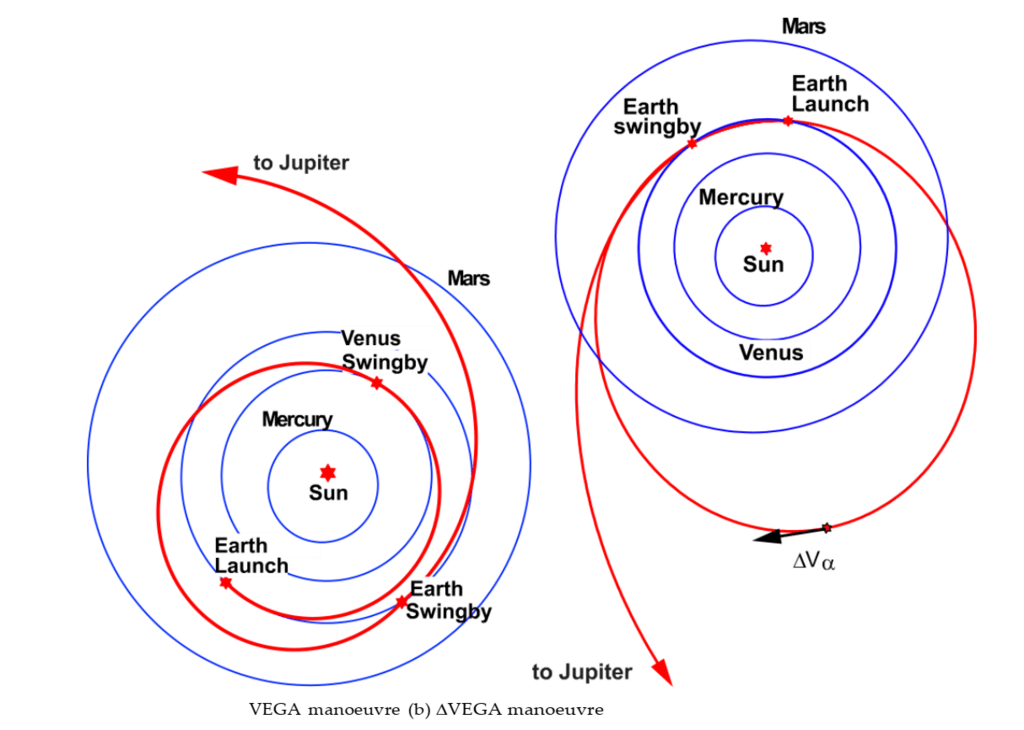
図1:VEGAおよびΔVEGA操作の図。

図2:2029年の打ち上げのためのセドナへの直行便の20年から50年までの飛行時間に対するΔVΣ

図3:2029年の打ち上げのためのセドナへの直行便の20年から120年までの飛行時間に対するΔVΣ。

図4:2029〜2034年の打ち上げ日間隔でEJSedスキームを使用した飛行時間に対する合計ΔVΣ。

図7:2029年のセドナへの飛行軌道
5.ディスカッション
このセクションでは、太陽系外縁天体への飛行の問題を解決するためのアプローチの比較を提供します
提案された記事および(McGranaghan et al。、2011; Kreitzman et al。、2013)のオブジェクト、および評価
私たちの研究の長所と短所。
私たちの研究では、単純化されたアプローチに限定しました。パッチを適用した円錐近似が使用され、
宇宙船の質量は、特定のロケットや宇宙船の推進システムについては推定されていません。 ∆VΣ
値は、セドナへのフライトの実現可能性と最適性の基準として使用されます。また、放射線量
木星のフライバイ中に宇宙船が受け取る可能性のあるものは推定されていませんが、ΔVΣ値と
木星上空の飛行高度が取得されます。この高度は、放射線量に影響を与える重要な要素です。
このようなアプローチは、(McGranaghan et al。、2011)で使用されているアプローチと似ていますが、(Kreitzman et al。、2013)
宇宙での打ち上げと操縦の既存の手段をレビューし、初期質量と到着質量を評価します
宇宙船の分析と木星フライバイ中の放射線障害の分析
保護レベル。フライトを考慮した論文(McGranaghan et al。、2011; Kreitzman et al。、2013)とは異なり
木星のみの重力アシストを使用して、さまざまな太陽系外縁天体に、私たちの研究では、
セドナへのミッションのみ。同時に、このミッションのより深い分析を実施しました(
使用される単純化されたアプローチのフレームワーク)。分析、その結果はこの記事で提示されます、
2029年から2034年の4つの打ち上げ日に実施されました(これらの年は、組織化するのに最も現実的であるように思われます
予見可能な将来のセドナへのフライト)およびさまざまなフライトスキーム(直行便からセドナへのフライトの両方を含む)
セドナと1〜5回の重力操作、および遠地点の近くで発生する可能性のある衝動
セドナへの飛行軌道の地球から地球への部分。提案された記事で与えられたΔVΣの値は
LEOから地動説への移行に必要なΔVを単純に合計することで得られます。
宇宙船推進システムによって実行されるすべてのΔV。これらの合計は完全に正しくありません。
2種類の操作は、異なる推進システムによって実行されます。一部のフライトオプションについては、
各操作の値は記事に記載されているため、ΔVΣをさらに推定することができます。
特定のロケットや宇宙船の推進システムに正確に対応します。
(Kreitzman et al。、2013)では、高推力と低推力の両方を持つ太陽系外縁天体への飛行が考慮されています。低推力の使用により、到着質量をいくらか増加させることが可能であることが示されている。
高推力と比較した宇宙船の
。私たちは自分たちを高いものだけを考慮することに限定しました
推力。しかし、私たちの分析が示すように、地球-金星-地球-地球ジュピター-セドナスキームによる高推力飛行は、低推力と比較して宇宙船の最終質量を大幅に増加させる可能性があります
同じ飛行時間で地球-木星-セドナスキームに従って飛行します。私たちの分析は、
EVEEJSedスキームの下での高推力の飛行は、平均して、
宇宙船は、同じ飛行時間でのEJSedスキームの下での低推力の飛行と比較して、
25年以上。同時に、提案された記事で検討されたEVEEJSedスキームは、(Kreitzman et al。、
2013)。これにより、(Kreitzman)で研究されているように、セドナの周りの宇宙船を周回することは事実上不可能になります
et al。、2013)。また、私たちの論文で検討されている多重重力アシストは、軌道のコストを高くします
地球-セドナまたは地球-木星-セドナの飛行よりも修正操作。この費用は見積もられていません
現在の論文で。
私たちが得た結果は、ミッションの実際のプロジェクトの開発の基礎として役立つことができます
宇宙船のための適切なロケットと推進システムの決定を含むセドナへ。これらのツールの限られたセットを提供する(Kreitzman et al。、2013)とは対照的に、それらの選択
私たちの結果に基づいて拡張することができます。
セドナへのミッション機会の分析 2029-2034
この記事では、2029-2034年に打上される海王星以遠天体(90377)セドナへの軌道設計に焦点を当てています。セドナは現在、太陽から約74 auの距離で周囲に移動しています。近日点通過は2073-74年と推定されています。それはそのような遠い天体を研究する機会を開きます。軌道と1万年の期間で知られるセドナは、深宇宙探査のためのエキサイティングな物体です。現在の研究は、セドナへの転送の2つの可能なシナリオを提供します。直行便と重力アシスト操縦を含むフライトが考慮されます。今回の研究では、全特性速度と飛行時間値が高いため、直行便は実質的に非現実的であることが示された。有望なシナリオには、金星、地球、木星、土星、海王星付近の重力アシスト操縦が含まれます。セドナへの飛行中に小惑星への接近の分析が行われていた。この記事で発表された調査の結果は、2029年の打ち上げが最小の総特性速度の点で最良の転送条件を提供することを示しています。分析は、2034年に打ち上げのための大きなメインベルト小惑星(16)プシケの小さな追加のインパルスフライバイと2029年の打ち上げのための(20)マサリアが可能であることを示しています。
キーワード:セドナ、ミッションデザイン、重力アシスト、最適化、深宇宙、小惑星
長い間、オールトの雲の概念は単なる仮説でしたが、1992年には天文学者J. X. X. Luu
D.C. Jewittは、近日点が約40 au、遠日点が約43auの天体(15760)アルビオンを発見しました。
この発見により、太陽系のカイパーベルトの領域が約30と60auの間に存在することが確認されました。
近地点が80auを超える物体(15874)1996TL66が1996年に発見されました。
巨大惑星の重力の影響により、1996TL66軌道が変更される可能性があります。発見はの必要性を明らかにした
外側のカイパーベルト領域とオールトの雲の間に位置する、明確な空間領域の分類
内側部分。この領域は、巨大惑星の重力場の影響で物体の軌道が変更され、そのまま宇宙に散乱する可能性があるため、散乱円盤天体と名付けられました。既知のほとんど
散乱円盤天体は海王星と軌道共鳴しています。さらなるステップはオブジェクト2003でした
天文学者M.ブラウン、C。トルヒーリョ、D。ラビノウィッツによる太陽から約80auでの2003VB12の発見
(Brown et al。、2004)。その後、このオブジェクトは(90377)セドナと名付けられました。 2004年から2006年まで、一連の
ハウメア、マケマケ、エリダ、クワワル、オーク(サイズは約1〜2000 km)などの大きな物体が続きました
(Jewitt&Luu、1995)、およびカイパーベルトで現在知られている他の比較的小さな物体
散乱円盤天体が発見されました。非常に多くの大きなオブジェクトの発見は、論理的な撤退につながりました
冥王星の惑星カテゴリー(冥王星とそれらの大きな天体は準惑星と呼ばれるようになりました)からの
同時に、太陽系外縁天体という名前の新しい団体の設立に。
散乱円盤天体のオブジェクトとしての(148209)2000 CR105および(90377)セドナとして。しかし、最初のオブジェクトは
セドナよりもわずかに早く太陽から発見されましたが、直径は比較的小さいです(セドナの直径約1000kmと比較して約285km)、セドナよりも太陽からの距離が短い、393
遠地点でのau。発見者(Brown et al。、2004)は、セドナをオールトの雲の内部オブジェクトとして分類していました
(de la Fuente Marcos&de la Fuente Marcos、2014; Saillenfest et al。、2019)セドナの遠地点による
半径は約1000auです。現在のところ、オールトの雲に属するオブジェクトは架空のものであり、
特定の研究が必要です。 Oort Cloudオブジェクトの候補としては、セドノイド(541132)が考えられます。
Leleākūhonua(2015年に発見、以前は2015 TG387として知られていました)(Sheppard et al。、2019)、および小惑星
2017 MB7(2017年に発見)。遠地点の半径が2000auを超えているため。
セドナは、その非常に細長い軌道と多くのことによって、上記の他のオブジェクトの中で区別されます
より大きな遠地点半径。オブジェクトの表面構成は、カイパーベルトでも一般的です(Cuk、2004)。
(Trujillo et al。、2005; Barucci et al。、2005; Emery et al。、2007;Páletal。、2012; Trujillo&
Sheppard、2014)、オブジェクトには、照射されたメタンによって生成された炭化水素堆積物の層があります。 炭化水素堆積物の存在は、セドナの表面が真っ赤な色合いである理由かもしれません(Cuk、
2004;シェパード、2010)。いくつかの研究は、水面下に海があるかもしれないことを示唆しています
オブジェクトの内部熱によって加熱されたセドナの(Husmann et al。、2006)。セドナの起源は
議論。発見者(Brown et al。、2004)は、セドナが太陽系で作成されたと考えています
その進化の初期段階で、それに続く動的効果のためにその軌道が変更されました
密集した星団内での太陽の形成(Brown et al。、2004; Morbidelli&Levison、2004; Kenyon&
ブロムリー、2004;アダムス、2010; Kaib et al。、2011;ブラッサー&シュワム、2015)。他のバージョンによると、
セドナの軌道は、恒星との遭遇によって変化しました(Kaib&Quinn、2008)(たとえば、ショルツ星の通過
7万年前(Mamajek et al。、2015)、太陽から52,000 auの距離にある)、またはセドナは
星間空間の低質量星または褐色矮星から捕獲された(Morbidelli&Levison、2004)。
現在、セドナは太陽から約80auの距離にあります。
その近日点の通過は2073-74年になると予想されています。セドナの公転周期は1万を超えているので
何年もの間、セドナに宇宙船を打ち上げ、それを至近距離で研究するというユニークな機会が現在開かれています。
セドナのような遠くの物体への宇宙ミッションは、惑星の重力アシストを使用して実行する方が良いです、
つまり、惑星の重力場を使用して、宇宙船の軌道エネルギーを増加させ、目的を持って使用する
弾道を変える。この記事(McGranaghan et al。、2011)は、移動軌道の研究結果を示しています。
2015- 2047年にセドナ(および他の4つの太陽系外縁天体)に。その論文は、地球と木星とセドナの移動、つまり木星でのみ重力アシスト操作を考慮しています。
が想定されます。転送の最適化、最小ΔV予算に関しては、24。48年の飛行時間のために著者によって作成されました。この最小値、
打上日に応じて、7.2(2045年)から11(2023年)km / sの範囲内にあります。同様の研究
(Kreitzman et al。、2013)によって実施されました。論文では、著者は太陽光発電の使用を研究しました
遠方の太陽系外縁天体に到達するための推進力(低推力)。
太陽系外縁天体へのミッションの分析に捧げられた他の出版物もあります。
記事(Zangari et al。、2019)は、以下を使用して100個のオブジェクトへの飛行に必要なΔV値を分析します。
木星の重力アシスト。論文(Sanchez et al。、2014、2019)は、ハウメアシステムへの飛行について考察しています。
海王星の軌道を超えた他のいくつかの準惑星は、衛星に侵入する可能性があります
軌道。作業中(Sukhanov&de Almeida Prado、2019)は、転送のためのテザースイングバイの使用を分析しました
ハウメアシステムへ。作業中(Aime et al。、2021)、著者はフュージョンドライブの使用を高速で分析しました
太陽系外縁天体に移す。
提案された論文は、セドナへの最適な軌道の詳細な分析の結果を示しています。
2029、2031、2034。また、2033、2036、および2037での打ち上げについて簡単に検討しますが、これらの年は
2029、2031、2034よりもミッションに不利です。
ここと以下のΔVバジェットは、ΔVΣとして指定されます。この値には、必要な∆V0値が含まれます
低軌道(LEO)から太陽周回軌道への移動と、搭載機を使用した操縦用
近くの推進システム(ここと以下では、これらの操作をアクティブ操作またはインパルスと呼びます)
惑星や深宇宙。転送中の軌道修正操作は行われません。
ナビゲーションと操作の実行精度に依存するため、考慮に入れてください。
本論文は、重力アシストを含む様々なミッションシナリオの研究結果を提供する
いくつかの惑星の近くで操縦します。地球からセドナへの直接飛行、およびその他の飛行シナリオが分析されます。
金星-地球-地球-木星または金星-地球-ΔVα-地球-木星の操作を使用します。ここで、ΔVαは
遠地点近くの衝動。このような操作により、ΔVΣの値が少し大きい木星に到達できます。
LEOからの地球-金星飛行にのみ必要なΔV0の値よりも。さらに、考慮されたすべて
セドナへの飛行のシナリオ(直行便を除く)には、ジュピターの近くでの重力アシスト操作が含まれます。重力
土星と海王星の近くでのアシスト操作も分析されます。
天王星は乗り換えから遠く離れた場所にあります
考慮された打ち上げ期間の軌道、これがこの惑星の重力アシストを実行することが不可能である理由です。
分析されたすべての飛行について、最適な(最小のΔVΣ値に関して)軌道が決定されました。
シナリオ。このタイプの最適な転送には長い時間がかかります。したがって、飛行の制限
20、25、30、40、および50年に等しい期間も考慮されました。以下に示すように、最高のフライト
スキームは打ち上げ日に依存します:2029年と2031年の地球-金星-地球-地球-木星-セドナ、2034年の地球金星-地球-地球-木星-海王星-セドナ。地球地球のアフェリオンは、ΔVΣをわずかに減少させます。さらに、飛行時間は25年です(つまり、およそ
(McGranaghan et al。、2011; Kreitzman et al。、2013)で受け入れられているのと同じように、ΔVΣは
セドナへの軌道のすべてのケースが考慮されました(McGranaghan et al。、2011; Kreitzman et al。、2013)。
この論文で検討されているいくつかの飛行計画では、木星に近距離で接近する必要があります。
重力アシスト。たとえば、これは地球-金星-地球-地球-木星-セドナの転送で発生し、ミッションがあります
2034年に打ち上げられ、30年の飛行時間。この場合、宇宙船は木星の高さで飛行します
4.2千キロメートルの、そして木星の強力な放射線帯は電子機器にとって危険かもしれません
宇宙船のコンポーネント(Podzolko et al。、2011)。しかし、宇宙船は放射線帯を通過します
木星の重力アシスト中は高速で、宇宙船の電子部品への放射線の危険性
小さいかもしれません。提案された論文の著者は、ΔVΣ値を評価することが合理的であると考えました。
2034年に打ち上げられ、木星より上の最低高度に制限がある30年の飛行時間は等しい
60万キロに。宇宙船が受けた放射線量の正確な推定
木星フライバイと宇宙船の電子部品に対するその危険性
放射線からの保護には、追加の研究が必要です。
セドナへの分析された最適な軌道のいくつかはまた、1つまたは
小惑星への接近に必要な追加のインパルスが比較的小さい、より多くのメインベルト小惑星。
3.セドナへの飛行のための重力アシスト操作
木星に到達するために金星と地球の重力アシストを使用して、大幅な削減を可能にすることができます
∆VΣ。 Earth-Venus-Earth-Jupiter(EVEJ)転送を使用できます(つまり、操作VEGAの適用=金星-地球の重力アシスト)ΔVΣを下げる。ただし、この操作を使用する利点は、
必要なΔVΣの項sでの木星への直行便は、大きいため比較的小さい(1 km / s未満)
金星または地球のフライバイ中には、追加のアクティブな操作が必要です。同時にEVEJ
飛行は木星への直行便よりはるかに長いです。これが、EVEJスキームが考慮されなかった理由です。
私たちの分析。
重力アシストを含むスキームの予備分析は、Tisserandを使用して行うことができることに注意してください
グラフ(Strange&Longuski、2002)。これにより、最小の∆V値を提供するスキームを決定できます。の
特に、木星への飛行計画の分析によって示されるように、作業で実行されました(奇妙な
&Longuski、2002; Hughes、2016)最低のΔVコストは、金星-地球-地球の重力アシストによって提供されます。
地球からセドナへの直行便と地球-木星-セドナへの直行便の考慮とは別に、このスキームを使用しました。
つまり、木星に到達するための金星-地球-地球重力アシスト(VEEGA)。このシナリオはそれを作ります
LEOからの飛行に必要なΔV0値よりもわずかに高いΔVΣ値で木星に飛行することが可能
金星へ。 2つの地球フライバイ間の飛行時間は2または3年です。近くの比較的低いインパルスΔVα
ほとんどの場合、ΔVΣの値を減らす地球から地球への弧の遠地点が実行される可能性があります。追加する
飛行シナリオへのそのような操作は、著者によっても研究されました。地球からセドナへの直行便
また、重力アシスト操作を使用したフライトとの比較も検討されています。
VEGAとVEEGAの操作には2つの欠点があります。まず、それらは打ち上げでのみ可能です
1。6年ごとの金星への飛行期間。第二に、VEGAの操縦により、飛行時間が長くなります。
1年半とVEEGAはさらに2、3年操縦します。これらの不利な点の最初のものは
これらの操作の代わりに次の飛行スキームを使用することによって排除されます:
•宇宙船を、高い遠地点と約2年の期間を持つ楕円形の太陽周回軌道に打ち上げる。
•遠地点の近くで数百m / sのアクティブな操縦を実行します。
•軌道の別のポイントで地球に戻り、地球の重力アシストを実行します(いわゆる
∆VEGA操作= ∆V + Earth Gravity Assist)。
∆VEGA操作は、任意の開始日に実行でき、期間は大幅に短くなります
VEEGA操作よりも。ただし、木星に到達するには、ΔVEGAには約1.5のΔVが必要です。
VEEGAよりkm / s多い。 ∆VEGA操縦は、Juno宇宙船によって適用されました(Matousek、2007年)。
2011年に木星に打ち上げられ、現在、衛星軌道からこの惑星を研究しています。著者は持っています
セドナへの軌道の分析では、この作戦は考慮されていません。 (それは簡単にわかります
地球-地球軌道遠地点の近くでのΔVαによるVEEGA操縦は、VEGAとVEGAの組み合わせです。
∆VEGA操作)。
VEEGA操縦の2番目の欠点は、宇宙船のおかげで簡単に回避できます。
金星、地球、木星の重力によって提供される高い軌道エネルギーが支援します。この高エネルギーのために、
合計期間を大幅に短縮でき、ΔVΣは直接の場合に必要な時間よりもかなり低くなります。
木星への飛行と同じ飛行時間。これについては、この記事で説明します。
セドナへの飛行のシナリオでは、以下の指定が使用されます。
ESed = Earth-Sedna直行便
EJSed = Earth-木星-セドナ
EVEEJSed = Earth-Venus-Earth-Earth-Jupiter-Sedna
EVEEJSSed = Earth-Venus-Earth-Earth-Jupiter-Saturn-Sedna
EVEEJNSed = Earth-Venus-Earth-Earth-Jupiter-Neptune-Sedna
EVEΔVE=地球-金星-地球-地球の軌道セグメントの遠地点の近くでのインパルスΔVαによる地球の操縦。
VEGAとΔVEGAの操作のシナリオを図1に示します。
図1:VEGAおよびΔVEGA操作の図。
図2:2029年の打ち上げのためのセドナへの直行便の20年から50年までの飛行時間に対するΔVΣ
図3:2029年の打ち上げのためのセドナへの直行便の20年から120年までの飛行時間に対するΔVΣ。
図4:2029〜2034年の打ち上げ日間隔でEJSedスキームを使用した飛行時間に対する合計ΔVΣ。
図7:2029年のセドナへの飛行軌道
5.ディスカッション
このセクションでは、太陽系外縁天体への飛行の問題を解決するためのアプローチの比較を提供します
提案された記事および(McGranaghan et al。、2011; Kreitzman et al。、2013)のオブジェクト、および評価
私たちの研究の長所と短所。
私たちの研究では、単純化されたアプローチに限定しました。パッチを適用した円錐近似が使用され、
宇宙船の質量は、特定のロケットや宇宙船の推進システムについては推定されていません。 ∆VΣ
値は、セドナへのフライトの実現可能性と最適性の基準として使用されます。また、放射線量
木星のフライバイ中に宇宙船が受け取る可能性のあるものは推定されていませんが、ΔVΣ値と
木星上空の飛行高度が取得されます。この高度は、放射線量に影響を与える重要な要素です。
このようなアプローチは、(McGranaghan et al。、2011)で使用されているアプローチと似ていますが、(Kreitzman et al。、2013)
宇宙での打ち上げと操縦の既存の手段をレビューし、初期質量と到着質量を評価します
宇宙船の分析と木星フライバイ中の放射線障害の分析
保護レベル。フライトを考慮した論文(McGranaghan et al。、2011; Kreitzman et al。、2013)とは異なり
木星のみの重力アシストを使用して、さまざまな太陽系外縁天体に、私たちの研究では、
セドナへのミッションのみ。同時に、このミッションのより深い分析を実施しました(
使用される単純化されたアプローチのフレームワーク)。分析、その結果はこの記事で提示されます、
2029年から2034年の4つの打ち上げ日に実施されました(これらの年は、組織化するのに最も現実的であるように思われます
予見可能な将来のセドナへのフライト)およびさまざまなフライトスキーム(直行便からセドナへのフライトの両方を含む)
セドナと1〜5回の重力操作、および遠地点の近くで発生する可能性のある衝動
セドナへの飛行軌道の地球から地球への部分。提案された記事で与えられたΔVΣの値は
LEOから地動説への移行に必要なΔVを単純に合計することで得られます。
宇宙船推進システムによって実行されるすべてのΔV。これらの合計は完全に正しくありません。
2種類の操作は、異なる推進システムによって実行されます。一部のフライトオプションについては、
各操作の値は記事に記載されているため、ΔVΣをさらに推定することができます。
特定のロケットや宇宙船の推進システムに正確に対応します。
(Kreitzman et al。、2013)では、高推力と低推力の両方を持つ太陽系外縁天体への飛行が考慮されています。低推力の使用により、到着質量をいくらか増加させることが可能であることが示されている。
高推力と比較した宇宙船の
。私たちは自分たちを高いものだけを考慮することに限定しました
推力。しかし、私たちの分析が示すように、地球-金星-地球-地球ジュピター-セドナスキームによる高推力飛行は、低推力と比較して宇宙船の最終質量を大幅に増加させる可能性があります
同じ飛行時間で地球-木星-セドナスキームに従って飛行します。私たちの分析は、
EVEEJSedスキームの下での高推力の飛行は、平均して、
宇宙船は、同じ飛行時間でのEJSedスキームの下での低推力の飛行と比較して、
25年以上。同時に、提案された記事で検討されたEVEEJSedスキームは、(Kreitzman et al。、
2013)。これにより、(Kreitzman)で研究されているように、セドナの周りの宇宙船を周回することは事実上不可能になります
et al。、2013)。また、私たちの論文で検討されている多重重力アシストは、軌道のコストを高くします
地球-セドナまたは地球-木星-セドナの飛行よりも修正操作。この費用は見積もられていません
現在の論文で。
私たちが得た結果は、ミッションの実際のプロジェクトの開発の基礎として役立つことができます
宇宙船のための適切なロケットと推進システムの決定を含むセドナへ。これらのツールの限られたセットを提供する(Kreitzman et al。、2013)とは対照的に、それらの選択
私たちの結果に基づいて拡張することができます。










※コメント投稿者のブログIDはブログ作成者のみに通知されます