








はやぶさ7年の旅の続きです。
NASAの後追いでは無く、オリジナリティが有って科学的価値の高い探査と言うことで「小惑星サンプルリターン」が考えられた。
1985年当時は化学推進ロケットしかなく、能力的に無理でした。サターン5型でも無理でしょうか。
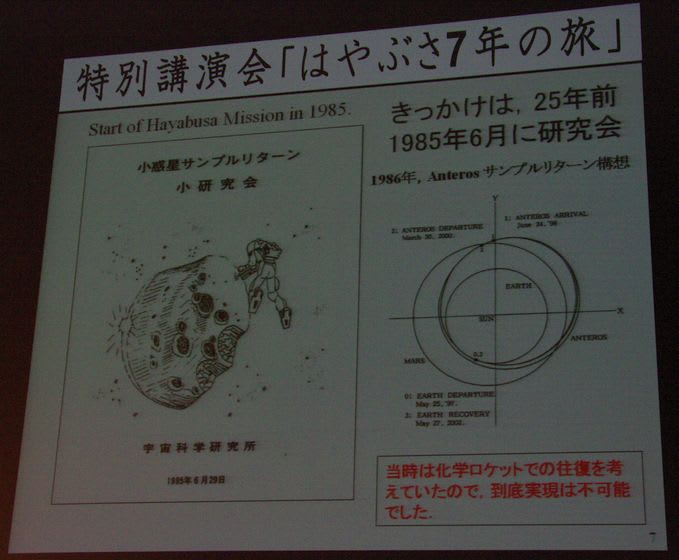
とりあえず、小惑星ランデブー(詳細観測のみでサンプルリターン無し)、彗星ダストサンプルリターン計画をNASAと共同研究してたら、NASAに先に実行されてしまった。
MUSES-C計画は、ハッタリで始めたそうですが、実現してしまうから凄い。サンプルリターンの有言実行はかなり難しい。
NASAは世界初でないといけない組織のようで、JAXAに小惑星サンプルリターンを先を越されて悔しいです。
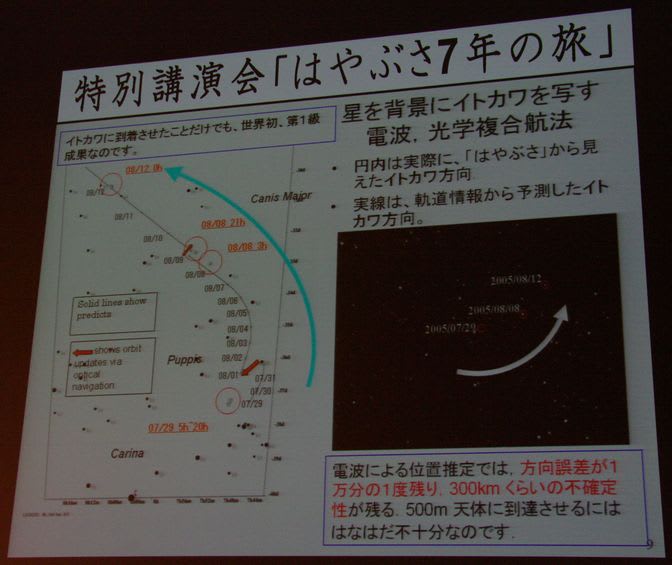
はやぶさが、恒星をバックにイトカワを撮影して自分の位置を知る。
地球からの電波による測定では距離誤差は10m程度だが、方向が1万分の1精度でも3億km先では300kmの誤差になり、長い所で500mのイトカワにたどり着けない。
はやぶさが自分で位置情報を修正していく。
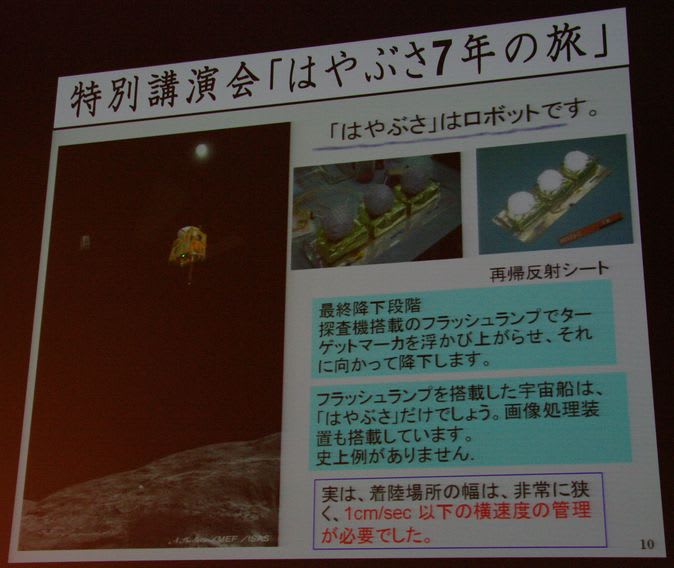
はやぶさはロボット。ストロボオンでターゲットマーカーが分る画像と無しの画像で移動方向を解析して目標地点に降下して行きます。
イトカワとランデブー状態とは言え、高度500mから狭い着陸地点に降下するには相対速度毎秒1cm以下で制御する必要があります。
はやぶさの着陸。
サンプラーホーンが接地したら、すぐに弾丸(プロジェクタイル)を発射(2発)の予定が、シーケンスプログラムに安全回路が残っていて発射できず。
ご本人が謝ってましたが、短時間でソフトを書き換える上に範囲が広いから担当者が忘れたんでしょうね。
ハードでは、結局邪魔で使わなかった障害物センサーも気になる所です。検出域の狭い物に変えるか搭載しないか決断が必要です。
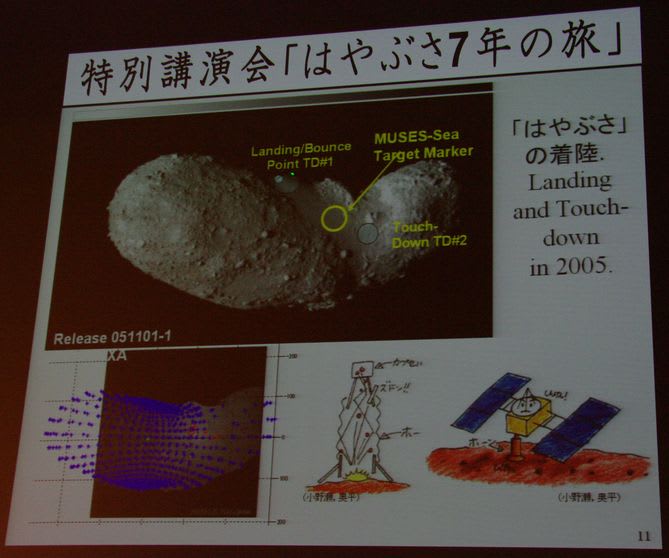
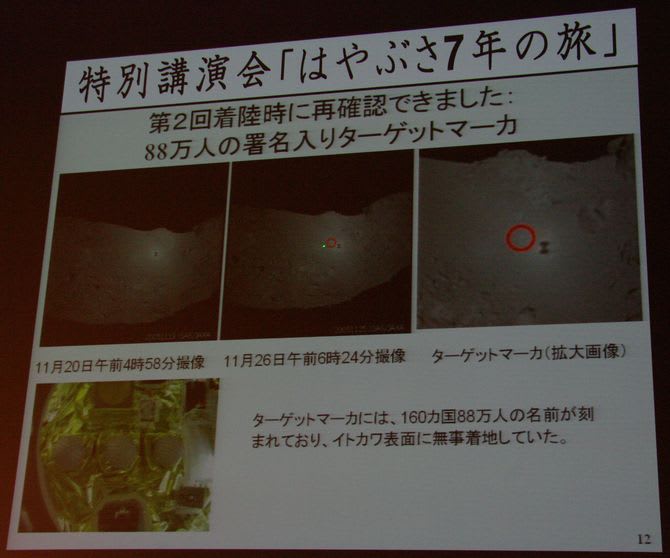
イトカワに落ちた「はやぶさ」の影で達成感。1回目と2回目ターゲットマーカに対して「はさぶさ」を正確に誘導できた。
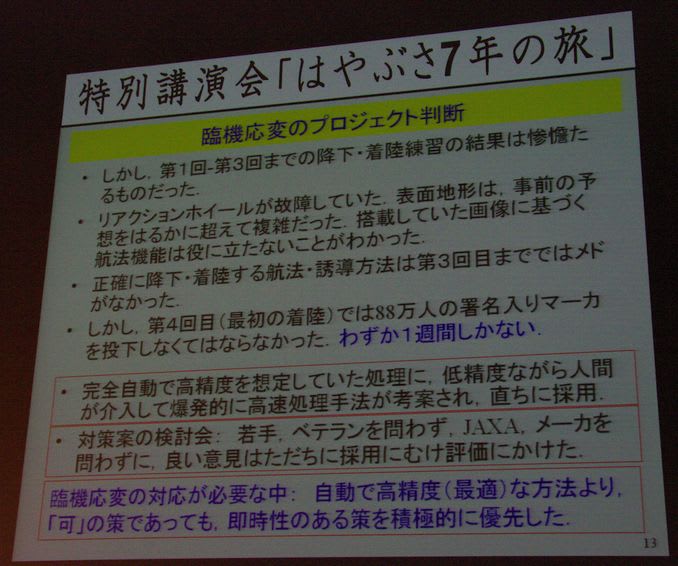
臨機応変のプロジェクト判断。地球帰還開始までに時間が無い。確実に着陸できれば良いので全自動にはこだわらない。
はやぶさ7年の旅3に続く
はやぶさ7年の旅に戻る
NASAの後追いでは無く、オリジナリティが有って科学的価値の高い探査と言うことで「小惑星サンプルリターン」が考えられた。
1985年当時は化学推進ロケットしかなく、能力的に無理でした。サターン5型でも無理でしょうか。
とりあえず、小惑星ランデブー(詳細観測のみでサンプルリターン無し)、彗星ダストサンプルリターン計画をNASAと共同研究してたら、NASAに先に実行されてしまった。
MUSES-C計画は、ハッタリで始めたそうですが、実現してしまうから凄い。サンプルリターンの有言実行はかなり難しい。
NASAは世界初でないといけない組織のようで、JAXAに小惑星サンプルリターンを先を越されて悔しいです。
はやぶさが、恒星をバックにイトカワを撮影して自分の位置を知る。
地球からの電波による測定では距離誤差は10m程度だが、方向が1万分の1精度でも3億km先では300kmの誤差になり、長い所で500mのイトカワにたどり着けない。
はやぶさが自分で位置情報を修正していく。
はやぶさはロボット。ストロボオンでターゲットマーカーが分る画像と無しの画像で移動方向を解析して目標地点に降下して行きます。
イトカワとランデブー状態とは言え、高度500mから狭い着陸地点に降下するには相対速度毎秒1cm以下で制御する必要があります。
はやぶさの着陸。
サンプラーホーンが接地したら、すぐに弾丸(プロジェクタイル)を発射(2発)の予定が、シーケンスプログラムに安全回路が残っていて発射できず。
ご本人が謝ってましたが、短時間でソフトを書き換える上に範囲が広いから担当者が忘れたんでしょうね。
ハードでは、結局邪魔で使わなかった障害物センサーも気になる所です。検出域の狭い物に変えるか搭載しないか決断が必要です。
イトカワに落ちた「はやぶさ」の影で達成感。1回目と2回目ターゲットマーカに対して「はさぶさ」を正確に誘導できた。
臨機応変のプロジェクト判断。地球帰還開始までに時間が無い。確実に着陸できれば良いので全自動にはこだわらない。
はやぶさ7年の旅3に続く
はやぶさ7年の旅に戻る










※コメント投稿者のブログIDはブログ作成者のみに通知されます