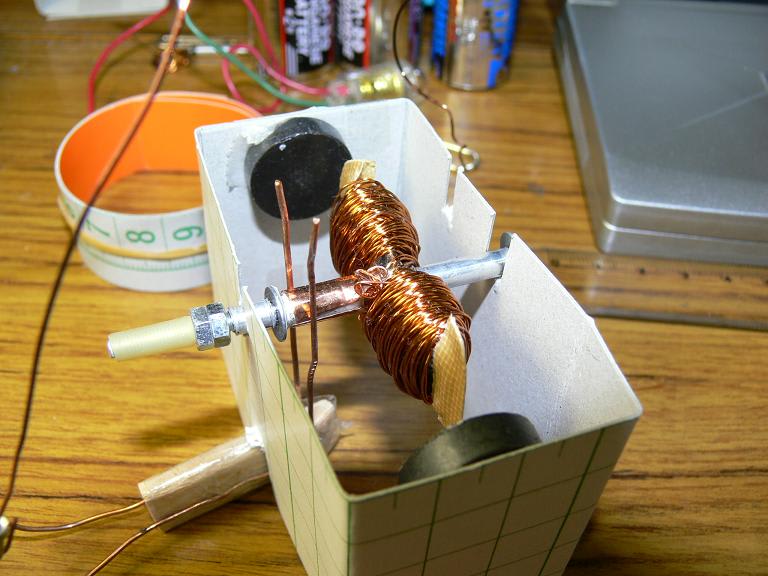
過去の失敗Ⅱ 手作りモーターをロビーの動力にしようとして 2008-10-29 01:19:18 | Weblog それなりに一所懸命考えて、作りましたよ。ま、大変でした。これ、50㎜のビスを軸に金具を取り付け5メートルのエナメル線をぐるぐる巻きました。エナメル線を巻いたことあります? 巻いてるうちに線がよじれてくるんですよ。で、こんがらがる。ほどけない。泣きながら作りました。電池につなげてクルクル回ったときゃ、まあうれしかった。but、動力にするには力が弱すぎることが判明。脱力し斜め上方25度で遠くを見つめました。
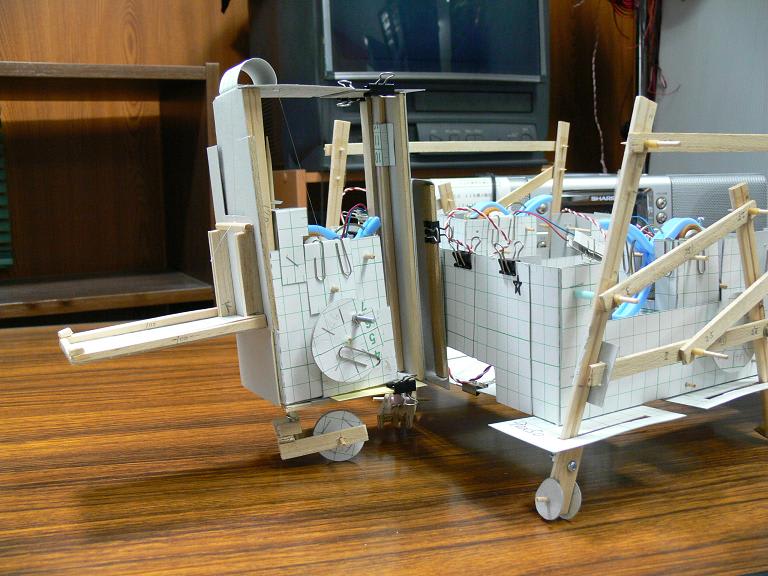
現在の課題 2008-10-23 00:38:50 | Weblog それは歩行ロボットのための作業ユニット製作です。写真は6足B型の前部につけたリフト。これも「おで串ギア」を使用。大福1個程度の荷揚げ作業ができます。やや重心が前寄りすぎるので改良中です。今後、アームや各種発射装置なども製作し、月面基地建設に使用できるようにしたいと思います。
ロビイズハート 2008-10-21 01:18:08 | Weblog 最も重要なギアです。これが正確にできるかどうかで、ロビイたちの人生が快活で幸せに満ちたものになるか、それとも果てしない苦難に満ちたシジフォスのそれになるかが決まります。紙は市販の工作用紙。半径20㎜。3枚重ねてホチキス留め。モーターの高速回転を直接受け止めるだけに、正確な円を切り抜くことが要求されます。これを軸と木工用ボンドで固定。回転させたとき、ブレがあってはなりません。また、軸との固定が弱いと突然の悲劇があなたを奈落の底に突き落とします。写真で見るとなんともチンケなものですが、めいっぱいの愛を注いで作ります。
おでんの串ギアボックスをばらすと 2008-10-19 01:23:37 | Weblog このような、素朴な部品たちになります。2つあるギアの軸がおでんの串です。なるべくまっすぐで丸いやつを使います。耐久性・紙との相性抜群。おでんの串エライ!
で、これがその 2008-10-17 01:38:31 | Weblog 「おでんの串ギアボックス」です。わかりやすくするため側面を開けて撮影しました。これにより、モーターの動力をかなり効率よくクランク部に伝えることができるようになりました。作り方のコツをまた紹介いたしますので(それなりに結構大変)、よろしければ作ってみてください。
ど失敗の初期6足機 2008-10-16 01:10:41 | Weblog その1 ギア比がNGですっ飛ぶように走ったあげく分解。 その2 両サイドの脚と中央の脚の動きが微妙にシンクロしない。 6足歩行のメカニズムなんて中学の教科書にも載ってたし、ちょろいもんだぜ!とか考えていたのが大間違い。まともな6足への改良に1年かかりました。 おはずかしい。 でも、その過程で「おでんの串ギアボックス」が生まれ、紙でも安定した駆動部を持てるようになった。この子のおかげです。ずっと大切にしてゆきます。
直立歩行の弟です 2008-10-15 01:40:10 | Weblog 藤崎マーケット風にライライ歩きます。方向変換も6足の兄より軽快。 兄弟とも同じ型の「おでんの串ギアボックス」を駆動部に据えています。 その辺は、またおいおい。
かみdeロボット3原則 2008-10-14 00:48:54 | Weblog (1)身近な材料をとことん利用しようぜ! (2)がんばることよりも、あきらめないことが大事さ! (3)あらゆる生命とロボットに愛を!太陽系に平和を!
とりあえず、最新型の一台です。 2008-10-13 00:44:04 | Weblog 失敗につぐ失敗の末、ようやくまともに前進・後退・方向変換ができるようになったのが、この子です。コントローラー(これも紙製)につなげて操縦通り動いた時、泣きました。