![]()
まず何よりも、変化を脅威ではなく機会としてとらえなければならない。
ピーター・ドラッガー

Peter Ferdinand Drucker
Nov. 19, 1909 - Nov. 11, 2005

● 久しぶりの大雪
14日午後5時の積雪は、長浜市余呉町柳ケ瀬49センチ、高島市今津36センチ、彦根市31セン
チ、米原市朝日29センチである。昨夜は融雪剤を散布し対応し、早朝から除雪作業、10時から、
ホームページ更新し作業に入る。それにしても体力不足を痛感。クランチ用筋トレツールを購入強化
(メニュー作成は数日後)。

【今宵もぷぁ~っつとビールでひとり鍋】
寒中の作業もひとつの楽しみをもたらした。それまで遠ざかっていたビール(白い金麦)を飲もうと
して、いつものビールでないことに気づく。「クリア アサヒ」なのだ。どうしてなのだと彼女に聞く
と知らなかったというのだが、飲んでみる美味い。やはり日本のビールは世界一だと満喫する。
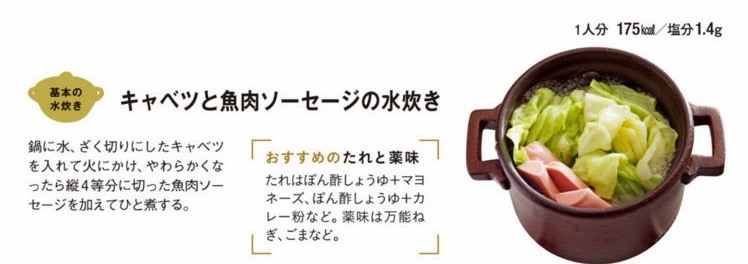
● キャベツとソーセージのスープ鍋

材 料:キャベツ 200グラム、魚肉ソーセージ 1本、水 2カップ、調味料 一粒コーンカッ
プスープの素1/2袋、塩 こ小さじ2/3
作り方:①キャベツはざく切りにする。魚肉ソーセージは半分の長さに切ってから、縦4等分に切る。
②鍋に水と塩を入れ、キャベツを加えて火にかける。やわらかくなったら、魚肉ソーセージを
加え、コーンスープの素を溶かし入れる。
アレンジ:鍋の残りの具と残された汁を丸ごとミキサーに入れて拡販する。別の鍋に移し、水分が少
なくなったら、牛乳を適量加え暖める。塩、黒こしょう各々少々で味を調える。

【RE100倶楽部:スマート風力タービンの開発 Ⅹ】
● これからのオールウインドシステム Ⅱ
【反撥型磁気軸受技術動向】
1-2-2 危険速度通過時の振動と制振
反発型磁気軸受は剛性が低いため剛体モードの固有振動数が低い。そのため、共振が大きく発生する
回転速度である危険速度が低く、回転機械の高速化のニーズに伴い通常使用回転速度領域を剛体モー
ドの危険速度より上に設定すると良いと考えられる。そのため、運転開始時および停止時に主危険速
度を通過する必要がある。また、最近の回転機械では定格回転速度が主危険速度より高速側に設定さ
れるものも多い。
例えば,航空機用ガスタービンエンジンでは、2次あるいは、3次のモードに対応する危険速度を超
えたところで運転されることが多く、また頻繁に加速や減速を行なうため、危険速度をどのように通
過するかは重要な課題である。回転軸系の危険速度通過時の振動についても、様々な報告がなされ、
2自由度回転軸系の危険速度通過時の非定常振動を解析的な分析結果、2つの危険速度の接近度に比
べ加速が緩やかな場合、1次危険速度通過後、1次の固有振動数の自由振動と強制振動の重ね合わせ
としてうなりが生じ、加速が速い場合、あたかも1つの危険速度を通過した時のように2次危険速度
通過後になって初めて、振幅の極大値が生じる。
また,、回転軸系がハードスプリング様式の非線形復元力特性を有する場合、危険速度通過時の非定
常振動は高速側に傾いた共振曲線に引き込まれたまま振動が増大し続けることを報告している。反発
型磁気軸受で支持された回転軸系を危険速度以上で高速回転させる場合、危険速度通過時に何らかの
制振手段を講じることが望ましい。回転機械が危険速度を通過する際の振動を抑えるには、つり合わ
せを行い振動源の振動レベル(加振力) を低減させることが重要であり、軸回転の角加速度(減速度)
を大きくすることが考えられる。
しかし、反発型磁気軸受のようなその減衰が小さい系では、十分な釣り合わせを行なっても振動が避
けられない場合があり、このような振動を抑制する方法として、ダンパによる減衰の付与や制御(減
衰や外力の付与)により共振を抑える制振法――例えば減衰を付与する方法として、振動箇所に導体
板を外付けし、導体板と対向した位置で磁石の磁極の向きを変えて磁石の片面だけを利用して構成で
きる実用的な磁気ダンパ――のようなパッシブ制振法は、パラメータ変動の影響を受けやすく、回転
速度が変化する回転機械では、全ての速度領域で最適な制振効果を得ることは難しい。一方、外部か
ら振動抑制のためのエネルギーを供給するアクティブ制振は、パッシブ制振法に比べて大きな制振効
果を得られるが、エネルギーを必要とし構造が複雑になる欠点がある。
また、制御パラメータが適切に設定されていないと系を不安定にする危険がある。セミアクティブ制
振法は、系のパラメータを変更する制振法であり,本質的には安定でありながらパッシブ制振法に比
べて大きな制振効果が期待できる。セミアクティブ制振法に関しては多くの報告がある。オーバーハ
ングロータにおいて、変位に応じて電磁石の吸引力変化をさせて支持剛性を低下させることにより、
コンプライアンスのピークを低下さる。永久磁石と電磁石を組み合わせ,その磁気反発力を利用した
磁気動吸振器を提案し、制振効果を確認されている。反発型磁気軸受を制振手段として利用する例で
は、危険速度より高い回転数では、内部減衰が系を不安定化する場合があり、反発型磁気軸受の軸受
剛性に方向差を与えることで、ロータの減衰特性を改善し、限界速度を高める方法を提案している。
また、共振を避けるため、共振点を定格回転速度からずらす制振法も利用される。回転機械の増速ま
たは減速時には、回転速度に応じて支持剛性パラメータを切り替えることにより振動を低減できるこ
とが期待できる。たとえば、軸の接触支持点の追加および除去を行っており、空気バネの制御により
剛性を変化させ、反共振点を利用することによって制振を行なっている。ピエゾアクチュエータを用
いた危険速度の変化を利用した制振を行なっている。
さらに、非接触の方法として、能動型磁気軸受の制御ゲインを可変として危険速度を通過する方法を
提案している。また、反発型磁気軸受1軸制御系の構成で、軸方向を支持する電磁石に対する吸引板
を円錐形状にし、電磁石にバイアス電流を印加して半径方向に寄与する吸引力を変えることにより、
結果的に半径方向の剛性を変化させ、危険速度を通過させる振動回避法が提案されている。
1-2-3 接触振動
磁気軸受系では、回転体が磁石等と接触防止の補助軸受が設置される。この軸受はタッチダウン軸受
とも呼ばれる。磁気軸受の補助軸受としては、すべり軸受、流体軸受が使われる場合もあるが、接触
時の摩擦を低減するためボールベアリングが使用されることが多い。磁気軸受の正常動作中には軸と
補助軸受が接触しないよう隙間が設けられる。この隙間は。回転機械の小型化、性能・効率向上を目
的にますます小さくなる傾向にある。反発型磁気軸受は剛性が低いため剛体モードの危険速度が低く、
回転機械の高速化のニーズに伴い通常、使用回転領域を剛体モードの危険速度より上に設定すると良
く、運転開始時および停止時に主危険速度を通過する必要がある。反発型磁気軸受で支持された回転
軸はその減衰が小さいため、危険速度近傍で大きな振れまわり振動を起こし、補助軸受と接触して接
触振れまわり振動が発生する恐れがある。また、回転軸が補助軸受と接触する場合、回転体の異常、
制御装置の異常等の場合も想定される。
転軸と補助軸受等の接触振動は、接触することにより系の復元力が区分線形様式の強非線形ばね特性
を持ち、かつ衝突と摩擦が作用する複雑な動的挙動であり、これまで多くの研究者が調べてきた。ロ
ータとステータの接触に起因する振動には、ラビング(接触前向き振れまわり振動、接触後向き振れ
まわり振動、衝突振動、分数・超調波振動、カオス振動などがある。
①後向き振れまわり振動やカオス振動は大きな振れまわり速度を持つ場合があり、発生すると周りの
装置に大きな損害を与える危険がある。
②前向き振れまわり振動は,不釣合いの応答として発生する強制振動であり、これまでに多くの報告
がある。
回転体が静止部と常時接触する回転同期前向き振れまわりの理論解を解析し、ハードスプリング様式
(漸硬形)の応答曲線を求め、ロータとステータの減衰、摩擦の有無による変化を調べ、接触により
運動方程式は連成し非線形性を持つが、振れまわり速度は回転速度に完全に同期する。また、前向き
振れまわりの安定性の調査で、自転速度が一定の定常状態では、全ての回転速度領域で安定している
が、一定加速度の過渡応答では、摩擦により、ある回転速度で不安定になることを示す。摩擦が小さ
く、減衰が大きいほど不安定領域は小さくなることもわかっている。補助軸受の支持剛性に方向差を
与え、早期に前向き振れまわりから離脱させる制振法の提案がある。また、接触による摩擦にり、後
向き振れまわりの自励振動発生が知られている。後ろ向き振れまわりついて、一定回転速度で突然不
釣合いが増加した場合の数値シミュレーションによれば、摩擦係数が大きいほど後向き振れまわりの
発生が早まる。
あるいは、定常的な後ろ向き振れまわりを仮定し、振れまわり振動を解析的に調べている。ロータの
振れまわり速度は下限と上限が存在し、下限はロータの固有振動数、上限はロータとステータが一体
となったときの固有振動数(合成固有振動数) である。さらに、その存在範囲は摩擦係数に依存し、
摩擦係数が小さいほど存在範囲が狭くなる。また、後ろ向き転がりふれまわりの定常状態の振動数を
理論的に検討し、①固有振動数、②減衰、③駆動トルク等の影響は、分数調波振動は、ケーシングを
バネとダンパで弾性支持し、動特性を考慮し、ケーシングの形状と剛性、減衰により、発生する分数
調波振動の変化を調べると.ケーシングが対称形の場合、奇数次のみ発生し、ケーシングの剛性が高
いほど発生速度領域が高速側へ移動する。また,非対称形の場合、奇数次に加えて偶数次も発生する.
また、オフセットの影響は、カオス振動の場合、衝突現象をばねとダンパで表した実現象に近い有限
時間の接触モデルを用いてカオス振動、さらに、反発係数と乾性摩擦で表した衝突現象のみを考慮し、
軸の復元力がないモデルで、不釣合いが小さく摩擦係数が大きい場合、後ろ向きラビング、逆に不釣
合いが大きく、摩擦係数が小さい場合は前向き振れまわり,さらにいずれも小さい場合は、カオス振
動が発生する。
以上のように、それぞれの接触振動の特徴で、定常的な振れまわりを仮定し系のパラメータの影響の
研究も多い。一方、ロータがステータと接触した後、どのような振動が発生しやすいかという問題が
ある。定常回転時に回転機械の欠損や変形を想定し不釣合いが急増した場合、外乱が加わった場合、
ロータとステータが接触した後の応答の、外乱の大きさや系のパラメータと発生する振動様態の関係
がわかっている。危険速度通過時は、これまでに、ロータが振れ止めに衝突した後、後向き振れまわ
りを生じる場合と、危険速度を通過できる場合があり、通過するための許容偏重心と角加速度の関係
を明らかにされている。また,モータのトルクが有限の系について、偏重心の大きさにより接触から
離脱し危険速度を通過する場合、前向き振れまわりが生じる場合、後ろ向き振れまわりが生じる場合
があることを数値シミュレーションと実験でわかっている。さらに、摩擦係数、ケーシングの支持剛
性の影響、さらに、数値シミュレーションと実験で摩擦、偏心、ばね特性、減衰等の各パラメータが、
円軌道型前向き接触ふれまわり運動、楕円軌道型前・後向き接触ふれまわり運動、円軌道型後向き振
れまわり運動の発生を増長させる影響が明らかにされている。
この項つづく
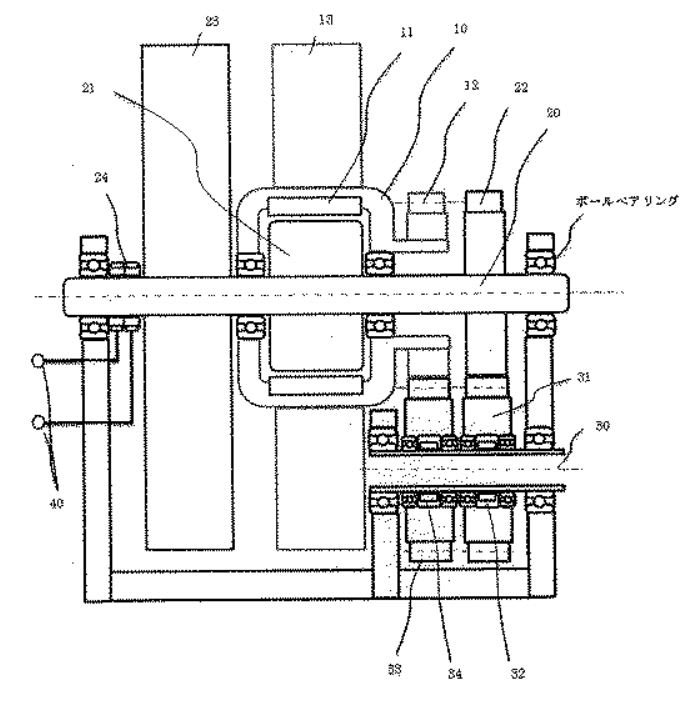
● 事例研究:フライホイールを使った波動発電装置
【特開2017-002885揺動運動による発電機構】
一般的な揺動体の揺動を発電機に発電エネルギーとして変換する発電機構として、波力で揺動する板
や浮力体の相対的な動きで油圧ポンプを駆動して圧力に変換後、発電機を回転させるような機構が提
案されているが、例えば特許文献1では、波受け部材と波受け部材の揺動運動で作動油を圧縮するポ
ンプと、蓄圧部と油圧モーターと、それらのユニット間を流れる作動油と、配管および発電機からな
り、波受け部材の揺動運動を発電機を回転させるための回転エネルギーに変換する構成が複雑で、そ
の結果、①故障確率が高くなり、②常にメンテナンスが必要不可欠となり、③作動油の漏れで河川や
海を汚染する可能性がある。
特許文献2おでは、波受け部材の一方向の揺動で発電機を回転させ、フライホィールで発電機の回転
を保持する構成が提案されているが、①揺動する波受け部材の両方向の揺動に対応せず、効率が悪い、
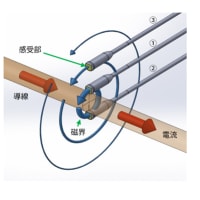
②一方、コイルに対して、マグネットを往復動させて、磁界を変化させることで、発電を行うような
単純な構造の懐中電灯もあるが、大きな電力は発生できないという欠点がある。
この新規考案は 揺動手段と発電機とのエネルギー伝達機構が、非常に単純な構成で揺動手段のいず
れの方向の揺動に対しても発電できるという利点がある。発電機は多極化されたハブダイナモのよう
に、1回転で複数回の磁極の反転が生じることで、発電する効率の高いものを用い、波受け板の揺動
軸が往動時は発電機の軸(コイルと鉄心を支える軸)を回転させ、復動時は発電機外装(磁石を支え
る外装)を発電機の軸とは逆方向に回転するように構成することで実現している。
 Jan. 5, 2017
Jan. 5, 2017
【符号の説明】
10 発電機外装 11 磁石 12 ギヤA 13 フライホィールA 20 軸 21 コイルと
鉄芯 22 ギヤB 23 フライホィールB 24 スリップリング 30 入力軸パイプ 31
ギヤC 32 一方向クラッチC 33 ギヤD 34 一方向クラッチD 40 出力端子 50
揺動軸 51 揺動板
【要約】
揺動軸と、軸を回転させて発電するタイプの発電機の軸および発電機外装に対し、揺動軸からそれぞ
れ回転連結方向の異なる一方向クラッチを介して回転力が伝わるように構成したことを特徴とする揺
動体で海の波やうねりあるいは風等を揺動板で受けて、単純な構成で効率よく発電する機構である。
これは面白い。